|
De raketer som föreslogs till ESA i januari 1987. Raketerna med heldragen blå linje runt sig blev huvudalternativen för fortsatta studier och det streckad linje var ett heleuropeiskt reservalternativ. |
Historia, teknik och uppskjutningar
Sven Grahn
Maxusraketen som har använts på Esrange för experiment i tyngdlöshet sedan 1991 har sitt ursprung i överväganden från 1980-talets mitt. Då hade det tyska programmet för experiment i tyngdlöshet i raketen TEXUS (Technologische Experimente unter Schwerelosigkeit) pågått i åtta år och ESA:s eget motsvarande program MASER (Materials Science Experiment Rocket) skulle just inledas (den första uppskjutningen skedde den 19 mars 1987). Båda rakettyperna kunde ge sex minuters tyngdlöshet och det var naturligt att undersöka om man inte kunde väsentligt öka denna tid. Idén var att mer än fördubbla tiden i tyngdlöshet.
I januari 1987 skickade den europeiska rymdorganisationens ESA "Microgravity Department" ut en begäran om förslag till "Interim Flight Opportunities". Man kan väl anta att "interim" avsåg flygmöjligheter i avvaktan på tillgången till rymdlaboratoriet Columbus som var tänkt att anslutas till USA:s då planerade rymdstationen "Freedom", en föregångare till ISS. En hel rad av förslag till raketer för att ge lång tid i tyngdlöshet kom in till ESA (se figuren nedan). I maj 1987 gav ESA Rymdbolaget i uppdrag att göra en utvärdering och jämförelse av dessa olika förslag till "Long Duration Sounding Rockets" (LDSR), d.v.s. sondraketer som gav ungefär dubbelt så lång tid i tyngdlöshet som tidigare raketers sex minuter. En preliminär rapport lämnades till ESA i juni 1987 och den slutliga rapporten är daterad den 22 december 1987 [1].
De raketer som föreslogs till ESA i januari 1987.
Raketerna med heldragen blå linje runt sig blev
huvudalternativen för fortsatta studier och det streckad linje var
ett heleuropeiskt
reservalternativ.
British Aerospace föreslog i
januari 1987 olika Skylarkkombinationer. Efter diskussioner valdes
Skylark 8 som det mest attraktiva
alternativet eftersom raketmotorerna till de båda stegen redan fanns
färdigutvecklade och för att raketen passade till existerande anläggningar på
marken. Kombinationen av de två raketmotorerna var dock ny. Nyttolastsmassan
antogs inkludera noskonen även om denna inte följde med till topphöjden.
Styrsystemet ingick inte i nyttolastmassan.
Det antogs att den normala nyttolastdiametern 438 mm som redan användes för raketerna TEXUS och MASER också skulle användas för LDSR. Waxwing-motorn skulle avskiljas efter brinnslut och exponera bärningssystemets värmesköld. Den farkost som skulle bärgas med fallskärm skulle utgöras av experimentnyttolasten, attitydkontrollsystem och servicemodul som var tänkt att anslutas till den koniska adapterna mellan raket och nyttolast.
För att sändas upp från Esrange krävdes spinnraketer för att få raketen i rotation, system för att strypa dragkraften från respektive motor, ett styrsystem under uppfärden och ett stabiliseringssystem under den tyngdlösa experimentperioden.
När Rymdbolagets jämförande utredning startade i maj 1987 framförde ESA kravet att minst 200 kg användbar experimentvikt skulle befinna sig i tyngdlöshet i 15 minuter. För att motsvara detta krav bytte BAe Waxwingmotorn i andra steget mot MAGE 2-motorn. Denna nya kombination döpte man till Skylark 17. På samma sätt som för Skylark 8 baserades även Skylark 17 på färdigutvecklade raketmotorer men kombinationen av raketmotorerna var ny.
Den 13 meter långa Skyalrk 17
med en Stonechatmoyor i första steget och en MAGE 2 i andra steget. Första
steget var tänkt att vara ostyrt och andra syteget skulle styras med det
styrsystem för spinande raketer som utvecklats av Saa Space - SPINRAC.
Exeperimentmassa skulle ha kunnat bli 178 kg och all massa som kunde ha nått
topphöjden skulle ha vägt 389 kg.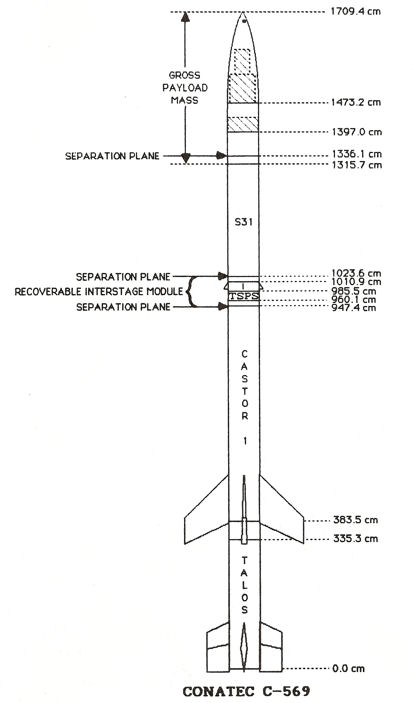
Bristol Aerospace i Kanada föreslog varianter av de väl beprövade Black Brant 10 och 12. Black Brant 14 var en idé till en fyrastegsraket med Taurus i både första och andra steget(Black Brant 12 använder Talos och Taurus som det första och andra steget). De två övre stegen var desamma som i fyrastegraketen Black Brant 12.
Black Brant 15 var en tänkt trestegsraket liknande Black Brant 12 med undantag för att de två första stegen (Talos och Taurus) bytts mot en enda Sergeantmotor. De tre övre stegen var igen tänkta att vara desamma som på Black Brant 12.
Fördelen med dessa
raketkonfigurationer var att den tyska rymdorganisationen DLR hade tillgång till
åtskilliga Taurus och Sergeant i tyska militära
överskottsförråd.
Men Black Brant 14 och
15 hade relativt begränsad nyttolastkapacitet vilket ledde till höga kostnader
per kg nyttig last. För att råda bot på detta problem föreslog Bristol Aerospace
Black Brant 16 som också var en variant av deras fyrastegraket Black brant 12,
men i vilken andra stegets Taurusmotor bytts ut mot en Sergeantmotor. Hela
raketen bestod således av motorerna Talos Sergeant - Black Brant 5 -
Nihka.
Problemet med Black Brant 15 och 16 var också att Sergeantmotorn
skulle ha slagit ned uanför Esranges s.k. A-zon (den fullständigt avspärrade
zonen närmast startplatsen). De raketdelar som landar inom A-zonen tas inte med
i beräkningen av risken att skada allmänheten. Därför bidrog alla raketsteg till
skaderisken som då blev för hög. Det var en av de viktigaste anledningarna till
att dessa versioner av Black Brant sorterades bort.
Den amerikanska konsultfirman
som startats av de före detta NASA-anställda Gene Kadar och Wayne Montag
föreslog tre raketkonfigurationer - C-567, 568 och 569. Conatecs raketer bestod
alla av en kärna av de två motorerna Talos och Castor I. Övre steget i C-567 var
tänkt att bestå av sondraketmotorn Nihka medan raketerna C-568 och C-569 använde
respektive satellitkickmotorerna Star 30E and 31 som övre steg.
Alla tre
raketkombinationerna kunde ge 15 minuter i tyngdlöshet med nyttolaster med
bruttovikter mellan 250 och 600 kg.
Fördelen med raketerna C-568
och 569 var att de existerande nyttolastmodulerna från Texus- och
Maser-programmen med 438 mm diameter passade inuti en noskåpa med diametern 965
mm trots att raketmotorernas diameter var tänkt att vara 787 mm.
Den
amerikanska firman Space Data Corporation skickade ett förslag till en sondraket
baserad på raketmotorn CastoroIV A till den tyska firman Kayser Threde (som
deltog i LDSR-studien). Detta alternativ framstod som mycket attraktivt eftersom
man skulle kunna få en nyttolastmassa på ungefär 718 kg.
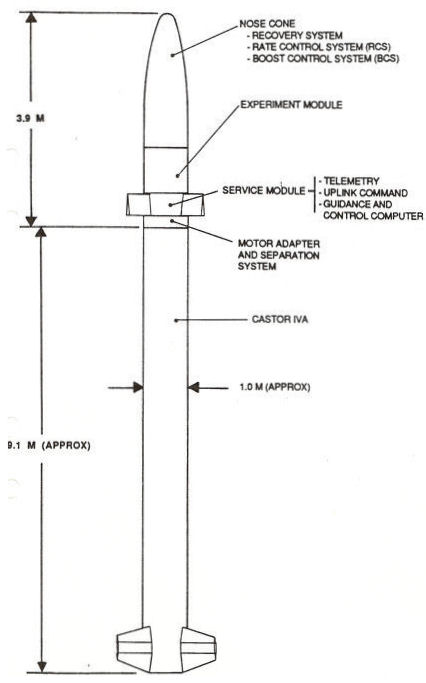
Raketmotorn och nyttolasten skulle få diametern 1016 mm och existerande experimentmoduler från Texus- och Maser-projekten med 438 mm diameter skulle kunna stå bredvid varandra. Castor IV A använder fast drivmedel.
I skissen
till höger ser man den första skiss av det som så småningom skulle utvecklas
till Maxus-raketen.
Hjälpraketen Castor IVA för satellitbärraketen Delta genomgick
"typpprovning" hos NASA 1988 och har också använts för bärraketen Atlas IIAS.
Raketmotorn har en hylsa av stål och kan ha en fast dysa, rakt monterad eller
snedställd med 7 eller 11 grader.
Castor IVB är en variant med styrbar dysa som kan vridas åt alla håll till en största vinkel av 6 grader.
Drivmedlet är HTPB (hydroxyl-terminerad polybutadien = gummi) med 20 % aluminiumpulver. Oxidatorn är ammoniumperklorat.
Space Data Corporation tänkte sig att använda motorvarianten med fast dysa och man ser av figuren till höger att de tänkte sig att raketen skulle ha nosroder för att styra raketen. Denna teknik utvecklades hos Saab på uppdrag av Rymdbolaget under 1970-talet (S 19-systemet).
Men dessa roder skulle inte ha någon verkan annat än alldeles i början av raketens brinntid (52 sekunder för Castor IVA) eftersom luften så småningom blir för tunn för att roderna skall ha någon verkan. För att hålla nere nedslagsspridningen skulle det därför ha varit nödvändigt att låta hela ekipaget spinna runt sin längdaxel. Det är därför högst tveksamt om det skulle ha gått att åstadkomma tillräckligt låg spridning med hjälp av nosroder.
Det var därför naturligt att de utredningar som följde på den första LDSR-studien skulle intressera sig för varianter Castor IVB med styrbar dragkraftvektor. Då skulle raketen kunna styras aktivt ända till brinnslut och man skulle också kunna undvika att låta raketen spinna.
Castor IVB-motorn väger ungefär 11 ton och har en dragkraft i vakuum på 423,3 kN och ett brännkammartryck på ungeför 32 bar. Brinntiden är ungefär en minut.
En aktivt styrd raket kan avvika avsevärt från önskad flygbana om styrssystmet krånglar. Därför måste raketens flygbana övervakas i realtid och tecken på avvikelser från avsedd flygbana upptäckas direkt. Flera oberoende baninmätningssytem följer raketen och man beräknar kontinuerligt den momentana nedslagspunkten (IIP = Instantaneous Impact Point). Med hjälp av den uppmätta vinden simulerar man före starten hur IIP-kurvan kommer att se ut. Om det verkliga IIP-spåret avviker signifikant från det simulerade kan man sända ett kommando som stänger av raketmotorn. Det sker genom att en sprängladdning gör ett hål i motorns ytterskal och brännkammartrycket faller raketmotorn stannar. Alla dess system behövdes för maxus och hade byggts upp redan i mitten av 1970-talet för ett helt annat projekt det tysk/amerikanska Porcupine i vilket fyra stycken styrda raketer av typen Aries sändes upp till en planerad topphöjd av ungefär 490 km (högsta uppnådd höjd blev 464 km). Porcupine var ett mycket ambitiöst rymdplasmafysikprojekt initierat av professor Gerhard Haerendel vid Max-Planck-institutet i Garching utanför München och raketerna förde med sig utkastbara dottersonder och utsläpp av material som skapade konstgjort norrsken. För Maxus' "Flight Safety Center" kunde man bygga på säkerhetssystemen för Porcupine, men självklart krävdes modernisering av dessa system.
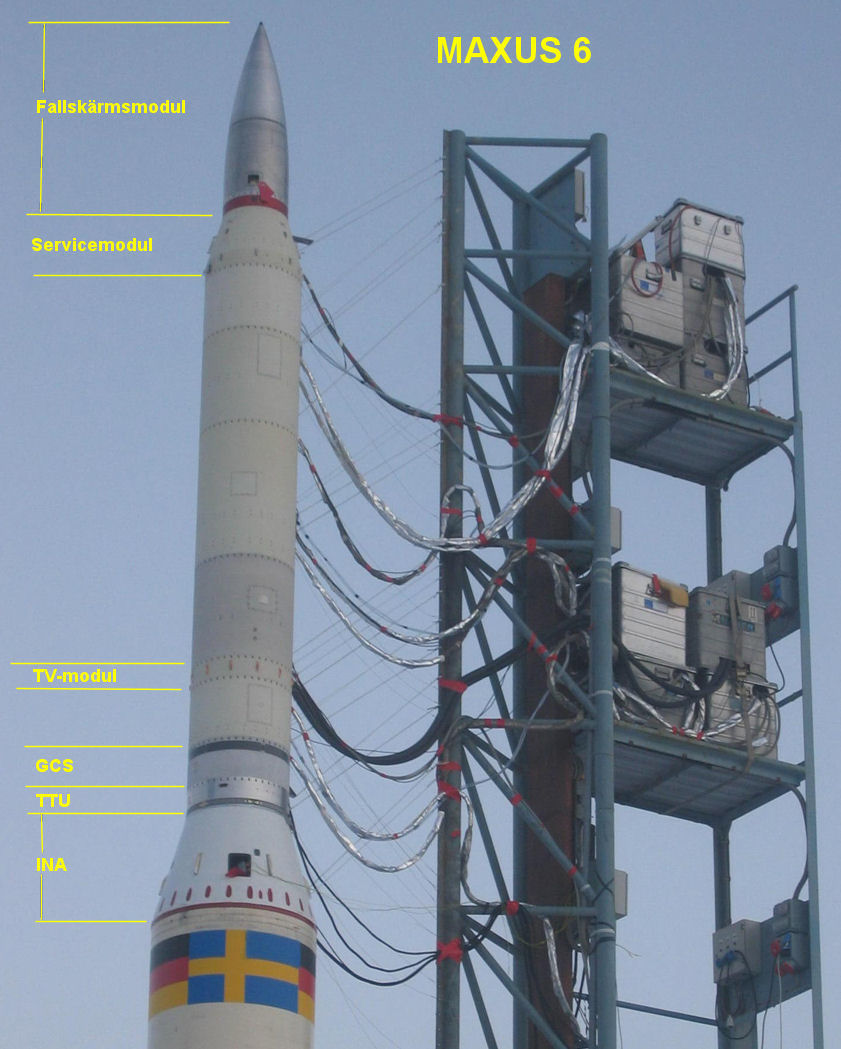
Även startplatsen för Porcupine användes för Maxus. Själva mjölkpallen på vilken raketen stod modifierades och det undanrullbara servicetornet gjordes högre för att man skulle få rum med Maxus som är betydligt längre än Porcupineprojektets Aries-raketer. Även det kabeltorn som står bredvid raketen vid starten byggdes om för Maxus. På bilden nedan ser man den helblå förlängningen av servicetornet och kabeltornet.

|
Viktigaste data för sondraketen MAXUS | |
| Rakettyp |
Castor IV B med 4 fenor. Motorn tillverkad av ATK, USA |
| Startramp | Aries-startplatsen: 67o 53' 36"' N, 21o 06' 19" Ö, 298 m.ö.h |
| Nyttolastmassa | 766-801 kg |
| Nyttolastlängd | 6445 mm (Maxus-8) |
| Nyttolastdiameter | 640 mm |
| Motormassa | 11559 kg (Total motormassa f Maxus 8). Drivmedel 9978 kg |
| Telemetri | Nyttolast 2292,5 MHz FM/PCM 128 kbits/s 10
W Motor 2297,5 MHz FM/PCM 256 kbits/s 10 W |
| TV | TV1
2205,5 MHz TV2 2228,5 MHz TV3 2251,5 MHz TV4 2275 MHz TV5 2315,5 MHz TV7 2361,5 MHz Scan 1 2294,5 MHz Scan 2 2295 MHz Scan 3 2296 MHz |
| Telekommando | 449,95 MHz, FSK 120 kHz deviation, 19,2 kbits/s |
| Motoravstängning | 448,0 MHz, IRIG tonkodning. |
| Radartransponder | 5612 MHz upp, 5662 MHz ned. |
| Radiofyr | 244,05 MHz |
| Nominell tid (s) | Höjd (km) | Händelse |
| 0 |
0 |
Raketen tänder |
| 63,7 |
79 |
Raketen slocknar |
| 85,5 |
|
Nyttolasten avskiljs |
| 86-90 |
|
Nyttolasten stabiliseras |
| 96 |
|
Tyngdlöshet bättre än 10-4 g börjar |
| 457 |
715 |
Topphöjd (varierar med nyttolastmassa) |
| 835 | Tyngdlöshet bättre än 10-4 g upphör | |
| 860-875 |
100 |
Retardation 50 g vid 866 s |
| 960 |
5 |
Fallskärmen fälls ut |
| Raket | Starttidpunkt | Nyttolast (kg) | Topphöjd (km) |
Planerat nedslag |
Verkligt nedslag | ||
| Bäring (o) | Avstånd (km) | Bäring (o) | Avstånd (km) | ||||
| Maxus-1 | 1991-05-08 kl 03:54 UT |
766 |
157,2 |
350 |
75 |
344 |
52 |
| Maxus-1B | 1992-11-08 kl 10:25 UT |
785 |
717,0 |
350 |
75 |
352 |
80 |
| Maxus-2 | 1995-11-28 kl 09:42 UT |
797 |
705,1 |
350 |
80 |
350 |
75,2 |
| Maxus-3 | 1998-11-24 kl 09:53 UT |
798 |
713,4 |
350 |
80 |
349 |
74 |
| Maxus-4 | 2001-04-29 kl 11:28 UT |
801 |
703,6 |
350 |
80 |
330 |
92 |
| Maxus-5 | 2003-04-01 kl 06:00 UT |
795 |
702,7 |
350 |
80 |
348 |
88,5 |
| Maxus-6 | 2005-11-22 kl 08:35 UT |
793 |
705,0 |
350 |
80 |
351 |
78 |
| Maxus-7 | 2006-05-02 kl 06:16 UT |
785 |
702,6 |
350 |
80 |
353 |
81 |
| Maxus-8 | 2010-03-26 kl 13:42 UT |
786 |
700,5 |
350 |
80 |
351 |
78,4 |
| Maxus-9 | 2017-04-07 kl 09:30 UT |
849 |
678,0 |
|
| ||

Den första uppskjutningen av Maxus våren 1991 blev i högsta grad dramatisk. På uppvägen ställde sig raketens utloppsmunstycke plötsligt i ena ändläget och raketen slog runt och nyttolasten bröts av. Märkligt nog fungerade fallskärmssystemet som avsett och nyttolasten kom ned från ungefär 150 km höjd i princip oskadd och kunde återanvändas. Orsaken till att munstycket blev så snedställt kunde spåras till bristande värmeskydd på de elektriska kablar som matade servostyranordningen vid munstycket. Heta avgaser från raketlågan strömmade baklänges upp i raketens akter och smälte isoleringen på kablarna och avbrott eller kortslutning uppstod och styrservot för munstycket fick felaktiga signaler från raketens styrautomat och vred ut munstycket maximalt. Felet var inte svårt att åtgärda, men det tog ändå 1½ år innan Maxus-1B kunde sändas upp. Den gången fungerade allt bra. Nedslagspunkten för Maxus-1 i figuren ovan är den gula pricken närmast Esrange.
|
|
 Jag var på
plats på radarberget på Esrange när Maxus-4 sändes upp.
Vädret var fantastiskt och uppskjutningen var mycket vacker. När raketen brunnit
slut och försvunnit upp mot himlen fick den dåvarande Esrange-chefen, Jan Englund,
ett samtal på mobilen. Det var Safety Operations Center där raketens
flygbana övervakades som ringde och berättade att raketen verkade följa
skjutfältets västra gräns och kanske skulle landa längre bort från startplatsen
än avsett (se kartan till höger).
Jag var på
plats på radarberget på Esrange när Maxus-4 sändes upp.
Vädret var fantastiskt och uppskjutningen var mycket vacker. När raketen brunnit
slut och försvunnit upp mot himlen fick den dåvarande Esrange-chefen, Jan Englund,
ett samtal på mobilen. Det var Safety Operations Center där raketens
flygbana övervakades som ringde och berättade att raketen verkade följa
skjutfältets västra gräns och kanske skulle landa längre bort från startplatsen
än avsett (se kartan till höger).
Det visade
sig att både raket och nyttolast slog ned någon kilometer på fel sida om gränsen
mot Norge(68° 37N, 20° 1Ö). När jag talade med personalen från
Rymdbolaget i Solna så framgick också att det verkade som om nyttolastens
fallskärm inte hade utvecklats farhågor som också besannades.
Raketen hade börjat avvika mot väster redan 7 sekunder efter
starten och haveriutredningen kom fram till att det var den gyrostabiliserade
navigationsplattformen (IMS) som börjat avvika i inriktning. Man hade varit
tvungen att byta ut IMS #2 mot reservenheten IMS #7 bara 1½ dag före
uppskjutningen, en faktor som kan ha bidragit till problemet eftersom de två
enheterna provats olika.
Fallskärmsproblemet berodde på att man p.g.a.
leveransproblem med det kanadensiska fallskärmssystemet i ett sent skede gått
över till ett tyskt fallskärmssystem som visade sig vara underdimensionerat för
de aktuella luftkrafterna. Fallskärmen slets sönder innan den hunnit fällas
ut.
Till all lycka sändes de
viktigaste data om hur experimenten fungerade ned till marken med radio så de
allra flesta av de vetenskapliga målen med uppskjutningen kunde uppfyllas.
Nyttolasten blev i princip totalförstörd vid nedslaget.
Nedslagspunkten för Maxus-4 i fotokartan ovan är den
gula pricken norr om den gula linjen (gränsen mot
Norge).
|
|
|
| Maxus-2 | 68o 33.39' N, 20o 44.72' Ö |
| Maxus-3 | 68o 35.20' N, 20o 46.90' Ö |
| Maxus-4 | 68° 37 N, 20° 1' Ö |
| Maxus-5 | 68o 42.07' N, 20o 41.17' Ö |
| Maxus-5 | 68o 38.01' N, 20o 53.68' Ö |
| Maxus-8 nyttolast | 68° 33.635 N, 20° 43.531 Ö. |
| Maxus-8 motor | 68° 35.078 N, 20° 46.352 Ö. |
I fallet med Maxus-8 var vissa experiment tillbaka vid Esrange vid + 1,5 timme och hela n yttolasten var tillbaka på Esrange vid +2,5 timme.
|
|